Contents
Support Managers
|
Xartashah
English
| online |
|
Aerielle Kiyori
English
| offline |
|
Alexander Pixels
English
| offline |
|
Amyalka
English
| offline |
|
Glaznah Gassner
English, Russian
| offline |
|
Justina Mcminnar
English
| offline |
|
Makaylah Wurgle
English
| offline |
|
Rehnaeaislinn
English
| offline |
|
Sammyredfire
English
| offline |
|
shorty McKeenan
English
| offline |
| show offline managers | |
| English, Russian |
Setting up waypoints
Setting up waypoints
We assume that you've purchased the Waypoints Navigation add-on for your bot. Now it is time to set up some way points!
Setting Up Waypoints
- First, you'll need to navigate to the Waypoint Editor, you'll find it on the left hand side of your Account Dashboard
- To add a new waypoint, click the Add new waypoint button, this will bring up a list of the various types of points you can add.
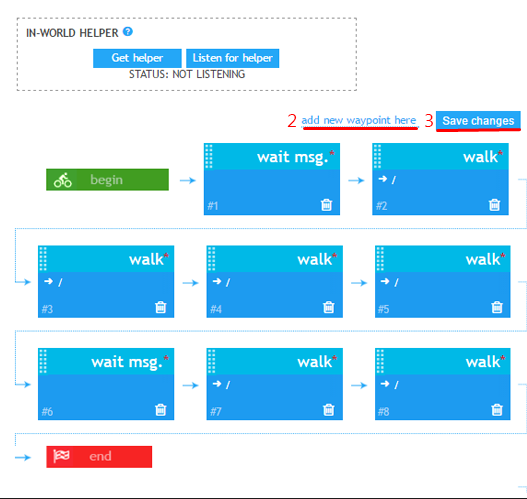
- After setting up your waypoints, click Save changes to apply the settings to the bot.
Tips and Hints
- Touching prims - it is often required to touch something in-world automatically. Read this page for details.
- Adding points in-world - to quickly add waypoints, use the Waypoint Helper device.
- Check the full reference of Waypoints commands.
Troubleshooting
- My bot stops before reaching the waypoint and skips to the next one.
- It's possible that your bot is hitting something and getting stuck on the way to the waypoint.
- Something else is going wrong?
- Contact our live chat or in-world support for more help!